
Minimally Invasive Surgery (MIS) is a revolutionary approach in surgery. In MIS, the operation is performed with instruments and viewing equipment inserted into the body through small incisions created by the surgeon, in contrast to open surgery with large incisions. This minimizes surgical trauma and damage to healthy tissue, resulting in shorter patient recovery time. Unfortunately, there are disadvantages due to the reduced dexterity, workspace, and sensory input to the surgeon which is only available through a single video image.
In this joint project between the Robotics and Intelligent Machines Laboratory of the University of California, Berkeley (UCB) and the Department of Surgery of the University of California San Francisco (UCSF), a robotic telesurgical workstation for laparoscopy is developed. The current design is a bimanual system with two 6 DOF manipulators instrumented with grippers, controlled by a pair of 6 DOF master manipulators.
With the telesurgical workstation, the conventional surgical tools are replaced with robotic instruments which are under direct control of the surgeon through teleoperation. The goal is to restore the manipulation and sensation capabilities of the surgeon which were lost due to minimally invasive surgery. A 6 DOF slave manipulator, controlled through a spatially consistent and intuitive master, will restore the dexterity, the force feedback to the master will increase the fidelity of the manipulation, and the tactile feedback will restore the lost tactile sensation.
To justify the cost and overhead of using a non-conventional and complicated tool, a robotic telesurgical workstation (RTW) has to either improve existing procedures or enable the surgeons to perform operations previously not possible. The target tasks chosen in the design of the UCB/UCSF RTW are suturing and knot tying, which are very difficult to perform with existing laparoscopic tools. This is mainly due to the lack of ability to orient the tip of the tools and the difficulties in hand-eye coordination. This makes many advanced abdominal procedures extremely difficult to be performed laparoscopically. Therefore, the design of the system is oriented explicitly towards easy suturing and knot tying. These tools could be used within the operating room or remotely for procedures in hazardous environments such as the battlefield.
The complete telesurgical workstation will incorporate two robotic manipulators with dexterous manipulation and tactile sensing capabilities, master devices with force and tactile feedback, and improved imaging and 3D display systems, all controlled through computers. The goal is to design a system which is both highly dexterous and intuitive to use, allowing complex surgical operations to be performed with minimally invasive techniques.

The current system is a second generation system, designed for extensive testing. It successfully achieved its goal to verify the concept, i.e., to show that using teleoperated 6 DOF slave manipulators, it is possible to improve dexterity and sensation in laparoscopic surgery, and therefore, improve the surgeons' performance and enable them to perform previously impossible surgical operations.
Our surgical manipulator is composed of two parts. The first part is the gross positioning stage located outside the body. It is responsible for positioning the millirobot, which is the second part of the slave robot. The gross stage controls the same 4 DOF as those available in conventional laparoscopic instruments. As the gross stage is located outside the body, there is not a tight space limitation. A parallel arrangement is chosen for increased rigidity and a small footprint. Three linear joints, which are connected to the base of the robot with U-joints, control the position of one end of a four-bar linkage. The tool arm and the motors actuating the gross rotation and the millirobot are connected to the opposite end of the four-bar linkage. All four actuators of the gross positioning stage are DC servo motors. In the linear joints, power is transmitted by lead screws connected to the motors. The roll axis through the entry port is tendon driven.
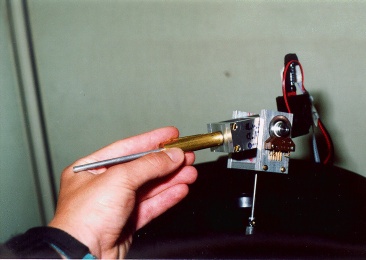
The second part of the slave, the millirobot, is located inside the patient and consequently must be small yet capable of producing a wide range of motion and relatively large forces. To meet these requirements, it has a 2 DOF wrist, with yaw and roll axis rotations, and a gripper (on the right). It is 15 mm in diameter. The wrist-to-gripper length is 5 cm. The yaw and roll axes are coupled and actuated with tendons jointly by three DC servo motors located on the end of tool arm outside the body.
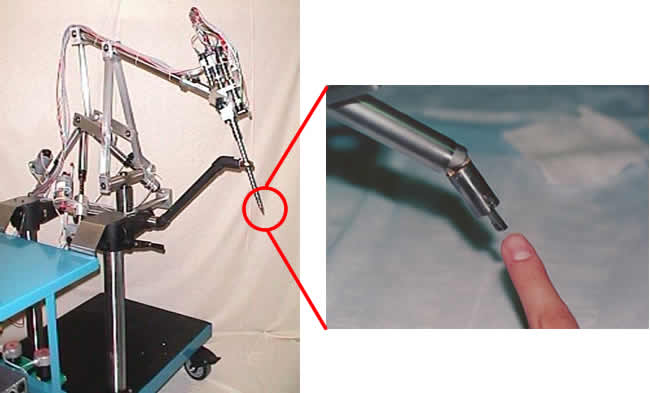
Slave manipulator of our Second Generation Robotic Telesurgical Workstation
for Laparoscopy
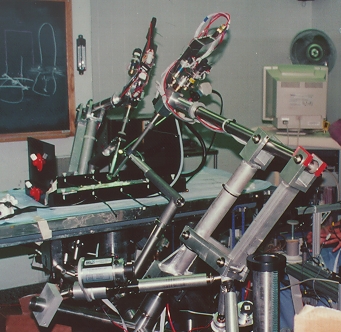
 Our Second Generation Robotic Telesurgical System for Laparoscopy during tests in the Experimental Surgery Lab at UC San Francisco (Spring 2000) |
Figure on the right (below) illustrates the positioning of the bimanual system in the operating room. The two slave manipulators are located at the opposite sides of the operating table. Figure on the left (below) shows the close-up view of the millirobotic section while tying a knot. Here, it is possible to see the advantage of having the 2 DOF wrist on the slave which makes it possible to have the nice approach angle and the opposing configuration of the two tools.
 Setup of the bimanual system around the operating table |
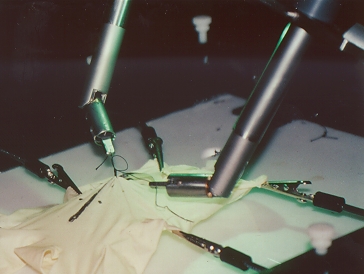 Close-up view of the Laparoscopic Manipulators while tying knots in a laparoscopic training box |
Below are some more pictures of our Robotic Telesurgical Workstation.
 Slave manipulators of the Robotic Telesurgical Workstation |
 Central control and power sub-unit for the slave manipulators |
 Master workstation |
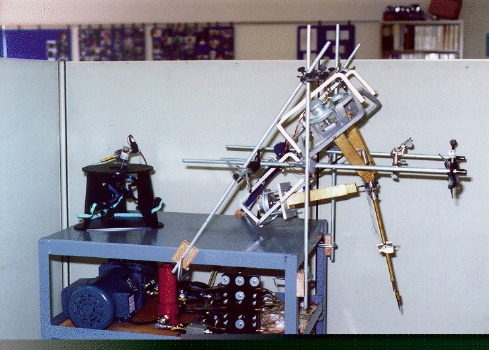
Complete view of the first generation Laparoscopic Telesurgical Workstation
The slave manipulator of our first generation laparoscopic manipulator design is composed of two stages. The first stage is for gross positioning of the end effector. It is a Stewart platform-like parallel manipulator, driven by electric motors, giving 4 degrees of freedom. A parallel structure is preferred over a serial one for its high rigidity. The second stage is the 3 DOF millirobot. It has a 2 DOF wrist and a gripper, driven by hydraulic actuators. The design of the millirobot is optimized to provide enough dexterity to perform suturing and knot-tying tasks.
 Slave manipulator of our first generation Laparoscopic Telesurgical Workstation |
 Laparoscopic Endeffector of the first generation system, which also has a 2 DOF Wrist and a Gripper
|
The surgical master, which has 7 degrees of freedom, is the primary interface between the surgeon and the laparoscopic surgery platform, providing force and tactile feedback. In this design, a commercial 4 DOF force-reflecting joystick device (Immersion Systems' Impulse Engine 3000) is extended with additional degrees of freedom and a stylus-like handle to be grasped by the user. The interface was designed to be able to include finger masters with a stereo tactile display unit.
 Surgical master for the first generation system |
 Close-up view of the surgical master |
Tendon driven multifingered manipulator for Laparoscopy.
Robotic hand with wrist and gripper.
Please refer to the Surgical Robots and Haptics and Teleoperation sections in our group's Publications page.
![]()
 Last
Update: January 2002. MCC.
Last
Update: January 2002. MCC.