- Home
- |
- Modeling
- |
- Impact Equations
- |
- Stability
- |
- Simulation
- |
- Papers
- |
- About Us
Welcome to CHESS Bipeds at the Center for Hybrid and Embedded Software Systems at the University of California, Berkeley! CHESS Bipeds is a research group instructed by Aaron Ames under the direction of Professor Shankar Sastry. Our mission is to understand humanoid locomotion by applying geometric reduction to control strategies for robotic immitation.
Recent News
For future updates, please refer to the respective homepages in the About Us section.
September 28, 2006: Based on our efforts before graduation from UC Berkeley, we have submitted a new paper, Stably Extending Two-Dimensional Bipedal Robotic Walking to Three Dimensions, to the 2007 American Control Conference. This paper extends the work from our previous LHMNC'06 paper in order to prove stable periodic 3D walking gaits using Hybrid Zero Dynamics.
February 15, 2006: We have released two movies showing the simulated animations of controlled reduced 3-D walking, which is described in our recent paper submission:
- Reduced 3-D Walking of a Hipless, Point-foot Bipedal Robot
- Reduced 3-D Steps of a Hipless, Point-foot Bipedal Robot
January 22, 2006: Go to the papers section to see our recent submission, Towards the Geometric Reduction of Controlled Three-Dimensional Robotic Bipedal Walkers, to the IFAC 3rd Workshop on Lagrangian and Hamiltonian Methods for Nonlinear Control in Nagoya, Japan.
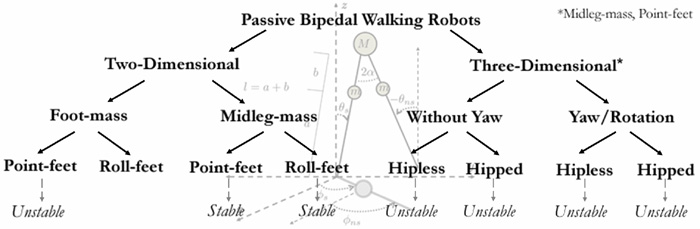
Above is a catagorization of bipedal walker models that are passive (those that use only energy provided by the environment). Notice that the planar midleg-mass model is passively stable down a slight slope, whereas the analogous three-dimensional model is not. This observation inspired our potential shaping control strategy to prove stable walking for a 3-D hipless walker!
CHESS Bipeds holds the exclusive rights to this website and all its original academic material.
Copyright © 2006 CHESS Bipeds. All rights reserved.