
|
|
|
Library ElementsA basic library elements can be a node or a link. We consider more complex components like entire subnetwork as special kind of nodes. In fact the COSI infrastructure allows the refinement of components by allowing a quantities to be entire communication structures.
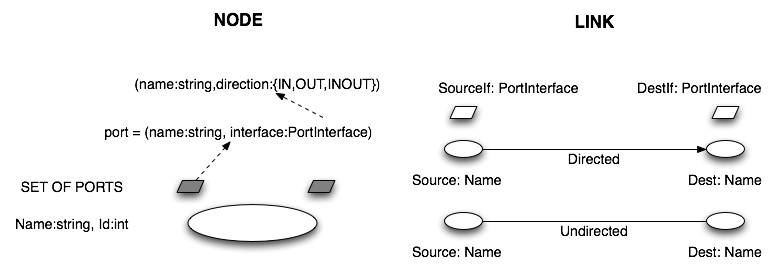
Representation of node and a link A node can be seen as the superposition of a beasic graph element like a vertex (that is simply characterized by a name and an id) and a set of ports. These ports will be attached as a quantity to the instantiated library element. When defining a node as library element the ports are simply a member of the component class. The definition of the node base class can be found in cosi::library::Node, while the definition of the ports of a node can be found in cosi::Ports. The ports of a node are pairs of a unique name, that identifies a port, and a cosi::PortInterface that defines the interface that that port supports. The interface has a name, that encodes the type of the interface, and a direction that can be input (IN), output (OUT) or bidirection (INOUT). Notice that the id is not assigned a priori but will be assigned at instantiation time.
Similarly, a link is the superposition of a bear link (i.e an edge between two nodes) and the interfaces that the link can connect to. Notice that the source and destination node of a link are defined by to quantities of type cosi::Name. They refer to the name of library elements. In this way we model the case where a link can be instantiated only between two specific library nodes. If a link can connect any two libary elements, then the value of the source and destination name will be To define a library component, the user of COSI does not extend cosi::libray::Node or cosi::library::Link directly. In fact, these two base classes are in common to any node and link component. What is missing in this base classes are functions that allow the instantiation of a component. The instantiation of a component is a function that, given the component paramters, returns a communication structure. Therefore, the instantiation function depends on the application domain becasue different applications require different labels to be attached to the components of a communication structure. For instance, for wired BAS, the communication structure that well models a platform instance is cosi::commstruct::wiredbas::PlatformInstance, and the communication structure that well models an implementation is cosi::commstruct::wiredbas::Implementation. For each application domain, the used defines an interface that an instantiable component must implement. For instance the following code defines an instantiable node for wired BAS: //============================================================================ // Author : Alessandro Pinto <apinto@eecs.berkeley.edu> // University of California, Berkeley // 545 Cory Hall, Berkeley, CA 94720 // Copyright : See COPYING file that comes with this distribution //============================================================================ #ifndef INSTANTIABLENODE_H_ #define INSTANTIABLENODE_H_ #include "libraries/Node.h" #include "networks/wiredbas/WiredBasPlatformInstance.h" #include "networks/wiredbas/WiredBasImplementation.h" namespace cosi { namespace library { namespace wiredbas { class InstantiableNode : public cosi::library::Node { public: InstantiableNode(); virtual ~InstantiableNode(); virtual cosi::commstruct::wiredbas::PlatformInstance* GetPlatformInstance(int V , Position pP ) =0 ; virtual cosi::commstruct::wiredbas::Implementation* GetImplementationInstance(int V , Position pP , ThreadSet pThreads, TransferTable pT ) =0; }; } } } #endif /*INSTANTIABLENODE_H_*/ Definition of a ComponentA component can be either a node, a link or a an entire network (e.g a bus). To define a component, say a node, the COSI user should extend an instantiable interface (Section Library Elements) that already extends the base class cosi::library::Node. A must define the necessary functions for instantiations and may define other functions to compute quantities that are relative to the component (like for instance the computation of the cost):
We report here the definition of an Arcnet sensor as an example to clarify the modeling philosophy. namespace cosi { namespace library { namespace wiredbas { class ArcnetNode : public Node { protected: cosi::models::wiredbas::ArcnetNodeCost* mCostModel ; public: ArcnetNode(); virtual ~ArcnetNode(); void SetCostModel(cosi::models::wiredbas::ArcnetNodeCost* pCostModel ) ; virtual cosi::commstruct::wiredbas::PlatformInstance* GetPlatformInstance(int V , Position pP ) = 0 ; virtual cosi::commstruct::wiredbas::Implementation* GetImplementationInstance(int V , Position pP , ThreadSet pThreads, TransferTable pT ) = 0 ; virtual double GetCost() = 0 ; }; } } } The definition of a sensor is not difficut now. Here is a code snippen for the header and source file: //============================================================================ // Author : Alessandro Pinto <apinto@eecs.berkeley.edu> // University of California, Berkeley // 545 Cory Hall, Berkeley, CA 94720 // Copyright : See COPYING file that comes with this distribution //============================================================================ #ifndef ARCNETSENSOR_H_ #define ARCNETSENSOR_H_ #include "ArcnetNode.h" namespace cosi { namespace library { namespace wiredbas { class ArcnetSensor : public cosi::library::wiredbas::ArcnetNode { public: ArcnetSensor(); virtual ~ArcnetSensor(); cosi::commstruct::wiredbas::PlatformInstance* GetPlatformInstance(int V, Position pP); cosi::commstruct::wiredbas::Implementation* GetImplementationInstance( int V, Position pP, ThreadSet pThreads, TransferTable pT); double GetCost(); RealDelay GetDelay(Vertex NodeId, cosi::commstruct::wiredbas::Implementation* pI, Vertex Src, Vertex Dest); double GetDelayValue(Vertex NodeId, cosi::commstruct::wiredbas::Implementation* pI, Vertex Src, Vertex Dest); std::string GetShape(); static std::string ComponentName; static std::string ComponentType; }; } } } #endif /*ARCNETSENSOR_H_*/ //============================================================================ // Author : Alessandro Pinto <apinto@eecs.berkeley.edu> // University of California, Berkeley // 545 Cory Hall, Berkeley, CA 94720 // Copyright : See COPYING file that comes with this distribution //============================================================================ #include "ArcnetSensor.h" namespace cosi { namespace library { namespace wiredbas { std::string ArcnetSensor::ComponentName = "ArcnetSensor"; std::string ArcnetSensor::ComponentType = "Sensor"; ArcnetSensor::ArcnetSensor() { //set up the ports mPorts.AddPort("P1", "EIA-485", cosi::PortInterface::INOUT) ; mPorts.AddPort("P2", "EIA-485", cosi::PortInterface::INOUT) ; } ArcnetSensor::~ArcnetSensor() { } cosi::commstruct::wiredbas::PlatformInstance* ArcnetSensor::GetPlatformInstance( int V, Position pP) { cosi::commstruct::wiredbas::PlatformInstance * RetVal = new cosi::commstruct::wiredbas::PlatformInstance(""); RetVal->AddVertex(V) ; (*RetVal)[V].PRJ(Name)SetValue(ComponentName); (*RetVal)[V].PRJ(Type)SetValue(ComponentType); (*RetVal)[V].PRJ(Position)Set(pP); (*RetVal)[V].PRJ(Ports)Set(mPorts); return RetVal ; } cosi::commstruct::wiredbas::Implementation* ArcnetSensor::GetImplementationInstance( int V, Position pP, ThreadSet pThreads, TransferTable pT) { cosi::commstruct::wiredbas::Implementation * RetVal = new cosi::commstruct::wiredbas::Implementation(""); RetVal->AddVertex(V) ; (*RetVal)[V].PRJ(Name)SetValue(ComponentName); (*RetVal)[V].PRJ(Type)SetValue(ComponentType); (*RetVal)[V].PRJ(Position)Set(pP); (*RetVal)[V].PRJ(Ports)Set(mPorts); (*RetVal)[V].PRJ(ThreadSet)Set(pThreads); (*RetVal)[V].PRJ(TransferTable)Set(pT); return RetVal ; } double ArcnetSensor::GetCost() { return mCostModel->GetValue(ComponentName, ComponentType, mPorts) ; } RealDelay ArcnetSensor::GetDelay(Vertex NodeId, cosi::commstruct::wiredbas::Implementation* pI, Vertex Src, Vertex Dest){ return RealDelay(0) ; } double ArcnetSensor::GetDelayValue(Vertex NodeId, cosi::commstruct::wiredbas::Implementation* pI, Vertex Src, Vertex Dest){ return 0 ; } } } } A few this must be observed. A component has two static string members that define the type of the component and the name. Notice that the type is used also to specify the type of requested component in the specification, therefore these strings must match. In oder wods, if a sensor in the specification has a type "Sensor" then a sensor component should also have a type "Sensor" otherwire there would be no components able to implement a node in the specificaion. The ports of the components are defined in the constructor. The ports must be defined because they are going to be used in the instantiation function. A sensor in this case has to bidirection ports that are meant to connect this component on a daisy chain bus. The instantiation function returns a communication structure. The integer id of the component must be give as a paramter. This correspond to rename the component. The rest of the instantiation function is easy to understand. The cost is computed by invoking the cost model that given the type and name of the component and its configuration returns the cost. The cost is always assumed to be a real number. Definition of ModelsA model is a function that maps a vector of quantities into another quantity that is called derived. If the computation of a derived quantity only required to know the configurations (i.e. the labels) of a communication structure, then the quantity is called directly derived and a model for it is called a direct model. In some cases, the computation of a quantity relative to a component requires to access information on other components. For instance, the access latency experienced from a node attached to a bus depends on the entire bus configuration. This quantity are colled indirectly derived and a modelfor them is called and indirect model.Typically, direct models' interface requires the label of a component to compute the derived quantity. Indirect models' interface, instead, take a communication structure and the id of a component and return the derived quantity of that component. See cosi::models::wiredbas::ArcnetNodeCost for an example of direct model and cosi::models::wiredbas::ArcnetBusDelay for an example of indirect model. Generated on Sun Sep 7 18:37:44 2008 for COSI by  1.5.4 1.5.4
|
 . A link is characterized also by the source an destination interfaces. It means that it can be only connected to a specific interface at the source node, and a specific interface at the destination node. The specific port name is decided at instantiation time.
. A link is characterized also by the source an destination interfaces. It means that it can be only connected to a specific interface at the source node, and a specific interface at the destination node. The specific port name is decided at instantiation time.