Since our humble start back in 1996, the BEAR group has demonstrated a number of milestone achievements in the development of advanced autonomy for UAVs and UAV/UGV platforms.
The objective of this project is to provide a viable solution for autonomous flight in an environment with urban or natural obstacles. The obstacle avoidance problem is resolved by combining the model predictive control approach with the concept of potential field. The MPC algorithm with an efficient gradient-search based optimizer is capable of generating the collision-free trajectory in real time, unlike existing algorithms not capable of real-time trajectory replanning or handling three-dimensional environment. The adjacent obstacles are sensed with an onboard laser scanner, which provides a local obstacle map along the flight path with sufficient accuracy and reliability.
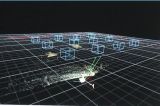
Major accomplishments are 1) the development of real-time solver for the proposed MPC algorithm, 2) the effectiveness of the cost function formulation that accounts for obstacle avoidance and trajectory tracking and 3) obstacle sensing and local map building using onboard laser scanner. The proposed framework was successfully tested on a Berkeley UAV as shown in the figure below in a series of test flight, in which the RUAV flies close to the shortest path to the destination while reaming free from any collision with nearby obstacles.
Researchers:
David Shim,
Jin Kim
Sponsor: PAM project, DARPA
Duration: 2003-2004
In this seedling project, BEAR team undertook a challenge to provide a UAV platform capable of performing a fully autonomous mission from take-off to land without any human assist. This goal calls for a vehicle with a powerplant that does not need any external help to start and stop. Conventional radio-controlled helicopters are based on four-stroke gasoline engine or glowplug engine, which all need external assist to start. Therefore, BEAR team chose an eletric helicopter as the platform, which is powered by extremely large capacity lithium polymer batteries. (40V 8000mAh in total). The brushless DC motor with RPM governing is the perfect answer for our applications- fully remote start/stop operation is simply done by a flick on the transmitter. The vehicle performs, as shown in the video link below, fully autonomous take-off and landing repeatedly without any human aid that we need for gas-powered helicopters.
Front View
Rear View
Ursa Electra in Hover
Ursa Electra in Hover
The following link is a video of Ursa Electra 1, the world's first electric UAV with fully autonomous take-off to land capability: Click here
Principal Researchers: Jonathan Sprinkel, Mike Eklund,
Jin Kim,
David Shim
Sponsor: Software Enabled Control (SEC), DARPA
Duration: 2004
This demonstration involved the development of a model predictive
controller that tracked a final waypoint, as well as avoided a
moving pursuit aircraft through the same controller. The timescale
of this project was about 6 months. We successfully demonstrated
the algorithms and code against a trained pilot, who was flying
an F-15 (see videos below).
Related Papers:
J. Mikael Eklund, Jonathan Sprinkle, S. Shankar Sastry, "Implementing and Testing a Nonlinear Model Predictive Tracking Controller for Aerial Pursuit Evasion Games on a Fixed Wing Aircraft", Proceedings of American Control Conference (ACC) 2005, (In Publication), Portland, OR, Jun., 8--10, 2005.
Jonathan Sprinkle, J. Mikael Eklund, H. Jin Kim, S. Shankar Sastry, "Encoding Aerial Pursuit/Evasion Games with Fixed Wing Aircraft into a Nonlinear Model Predictive Tracking Controller", IEEE Conference on Decision and Control, Submitted, Dec., 2004.
D. H. Shim, H. J. Kim, S. Sastry, Decentralized Nonlinear Model Predictive Control of Multiple Flying Robots in Dynamic Environments, IEEE Conference on Decision and Control,
December 2003.
Capture definitions for a pursuit/evasion game between fixed-wing aircraft (colloquially known as a dogfight).
Arena of Pursuit-Evasion Games
This MPG movie is of a symmetric PEG between our UAV (Yellow) and our adversary F-15 (Blue), which is piloted by a human.
This MPG movie is of a "chicken" game, where the adversary F-15 pulls out all the stops, and flies at maximum speed toward our speed-restricted aircraft, to see how long we can last before capture in a worst case scenario.
Acknowledgment. This section is adapted from the original page by Jonathan Sprinkle. The original is found here.
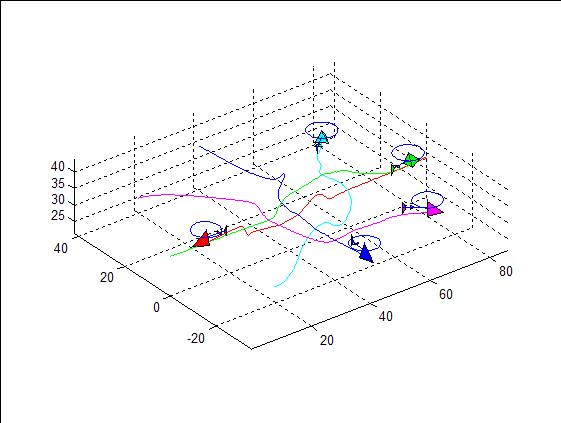
In this research, the dynamic trajectory replanning in the event of possible mid-air collision is demonstrated.
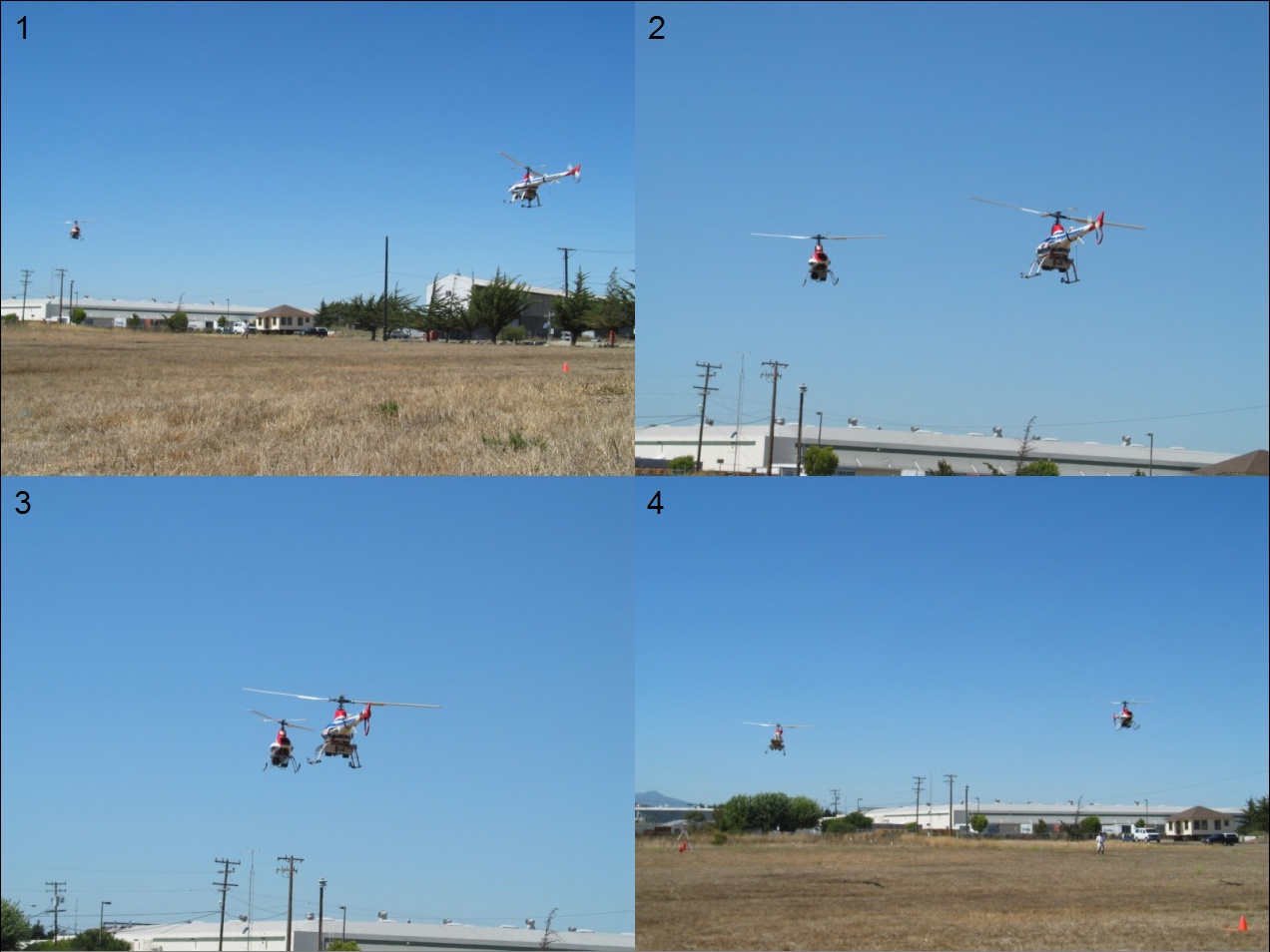
Each vehicle's flight control system is supervised with a online, fully decentralized trajectory generation based on model predictive control. Each vehicle boardcasts their current location. The proposed approach successfully finds safe paths for five helicopters in the simulation shown below. Encouraged by the simulation's outcome, we went ahead to try the idea on real Berkeley UAV platforms, each of which costs $100,000 (material only)!! So in total of $200,000 was set on a collision course. One can say we put two high-end Porches on a collision course and we hope our system can find safe paths to get these vehicles around each other without running into them. The two UAVs, Ursa Magna 1 and Magna 2, are set in an intentional head-on collision course.
The trajectory planner based on model predictive control computes the trajectories for two UAVs,
which minize the given cost functions that penalize the proximity to other UAV and the deviation from the original course at the same time.
Upon the successful test, our daring experiment grabbed a lot of attention and Discovery Science channel was one of them. The film crew came out in May 2003 and flimed out experiment, as linked below.
Related Papers: D. H. Shim, H. J. Kim, S. Sastry, Decentralized Nonlinear Model Predictive Control of Multiple Flying Robots in Dynamic Environments, IEEE Conference on Decision and Control,
December 2003.
Original Flight Path
Dynamically adjusted flight path
Simulation Visualization
This research was covered by Discovery Science Channel Canada in 2003, as can be seen in the follwing link:
Researchers:
Omid Shakernia, Cory Sharp,
David Shim
Sponsor: Dr. Alan Moshfegh, Office of Navy Research (ONR)
This project intends to deliver a technology that enables a rotorcraft-based UAV to land on a ship using its onboard vision system. It is well known that the landing of a helicopter on a ship deck under a constnt The goal of this research lies in the organization of multiple autonomous agents into organic intelligent systems with minimal supervision and cognition complexity, high-level of fault-tolerance, and maximized adaptivity to the changes in the task and the environment. The coordination of multi-agent system is architected as a set of distributed hierarchical hybrid systems, which emphasize the autonomy of each agent yet allows for coordinated team efforts. The proposed hierarchical structure transforms a highly complex large scale operation into a set of integrated and interactive modular functionals.
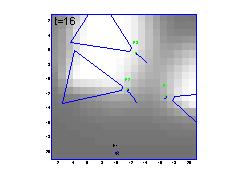
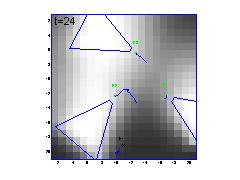
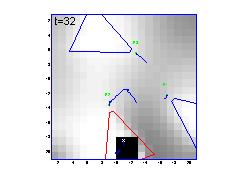
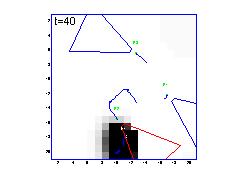
For the validation of the effectiveness of the proposed framework, a multi-agent probabilistic pursuit-evasion game (PEG) between teams of UAVs and UGVs is chosen. Multi-agent PEG is a promising benchmark application for cooperative multi-robot systems in which a team of agents acting as pursers attempts to capture a group of evaders within a bounded but unknown environment.
Since the full solution is often computationally infeasible in realistic situations, a number of suboptimal approaches are proposed: greedy policy and global-max policy. These proposed ideas were studied in simulations and compared in full experiments with Berkeley UAVs and UGVs.
Related papers: O. Shakernia, C. S. Sharp, R. Vidal, D. H. Shim, Y. Ma, S. Sastry, "Multiple View Motion Estimation and Control for Landing an Unmanned Aerial Vehicle," International Conference on Robotics and Automation, 2002.
Researchers:
Jin Kim,
David Shim,
Omid Shakernia, Rene Vidal, Joao Hespania
Sponsor: Army Research Office (MURI)
The goal of this research lies in the organization of multiple autonomous agents into organic intelligent systems with minimal supervision and cognition complexity, high-level of fault-tolerance, and maximized adaptivity to the changes in the task and the environment. The coordination of multi-agent system is architected as a set of distributed hierarchical hybrid systems, which emphasize the autonomy of each agent yet allows for coordinated team efforts. The proposed hierarchical structure transforms a highly complex large scale operation into a set of integrated and interactive modular functionals.
For the validation of the effectiveness of the proposed framework, a multi-agent probabilistic pursuit-evasion game (PEG) between teams of UAVs and UGVs is chosen. Multi-agent PEG is a promising benchmark application for cooperative multi-robot systems in which a team of agents acting as pursers attempts to capture a group of evaders within a bounded but unknown environment.
Since the full solution is often computationally infeasible in realistic situations, a number of suboptimal approaches are proposed: greedy policy and global-max policy. These proposed ideas were studied in simulations and compared in full experiments with Berkeley UAVs and UGVs.
Related papers:
R. Vidal, O. Shakernia, H. J. Kim, H. Shim, S. Sastry, "Multi-Agent Probabilistic Pursuit-Evasion Games with Unmanned Ground and Aerial Vehicles," IEEE Transactions on Robotics and Automation, vol.18, no.5, pp. 662-669, October 2002
H. J. Kim, R. Vidal, D. H. Shim, O. Shakernia, S. Sastry, "A Hierarchical Approach to Probabilistic Pursuit-Evasion Games with Unmanned Ground and Aerial Vehicles," IEEE Conference on Decision and Control, 2001